 |
ME507 Airheads Project v1.1.0
Flight Stabilization for Glider
|
|
ME507 Airheads Project v1.1.0
Flight Stabilization for Glider
|

This repository documents the development of a flight stabilization system for a glider. To access our written report for this project, click here.
This is a term project for Cal Poly's ME507 class. The scope of our project consists of:
To make this project more challenging and more fitting for ME507, we decided to use micro servo body DC motors instead of servos. To implement some form of feedback for the position of the motors, a motor mount was designed to couple a potentiometer to the shaft of the motor.

Our custom PCB is designed to fit on an ESP32 feather board.
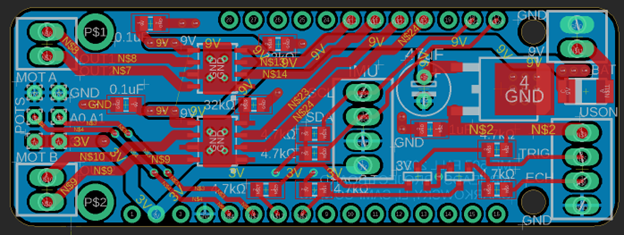
The board supports:
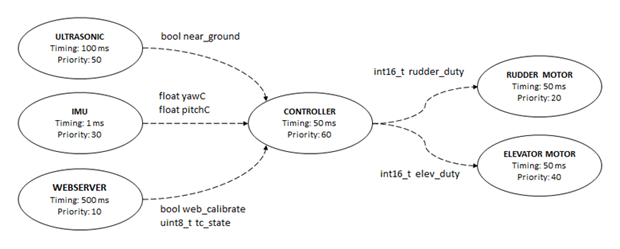
The software includes the following tasks:
The tasks are organized as shown below in the task diagram.
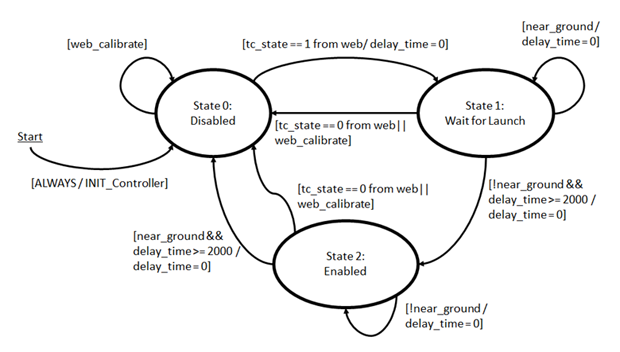
Our controller task is structured as a finite state machine with three states.
Every task runs "simultaneously" though cooperative multitasking with FreeRTOS.
To implement the IoT, the ESP32's Wi-Fi module is used to host webpage where the user can interact with the flight control system.

Through the webpage, we have the capability to activate, deactivate, and calibrate the flight control system. With more time, we would like to enable our program to support GET or POST requests to accept the user's typed input. This way we can seamlessly update our PID gains without recompiling and uploading our program for each iteration.
For full documentation of our code, please visit here. Our written report for this project can be accessed here.